Als Vorreiter im Bereich der Fertigungsdigitalisierung war es in unserem Interesse die hohe Genauigkeit der Werkzeugmaschine zu nutzen und ihre mechanische Steifigkeit mit der Flexibilität und Dynamik eines Industrieroboters zu kombinieren, um so einen Mehrwert für die Produktion zu schaffen.
Zusammen mit unseren Partnern – der Kaden & Salwiczek GbR, dem Institut für Werkzeugmaschinen und Produktionsprozesse (IWP) der TU Chemnitz und dem Fraunhofer Institut für Werkzeugmaschinen und Umformtechnik (IWU) – haben wir das Projekt RokoPro ins Leben gerufen.
Im Zuge des Projektes wurden folgende Szenarien realisiert:
- Sequenzielle Bearbeitung – Roboter und Werkzeugmaschine bearbeiten ein Werkstück nacheinander, Roboter und WZM benötigen jeweils ein eigenes Programm für die Geometrie
- Parallele Bearbeitung – zeitgleiche Bearbeitung von zwei Werkstücken durch Roboter und WZM, Bearbeitung der gleichen geometrischen Form (geradlinige Nut), Roboter arbeitet wie eine Werkzeugmaschine/bewegt sich nicht
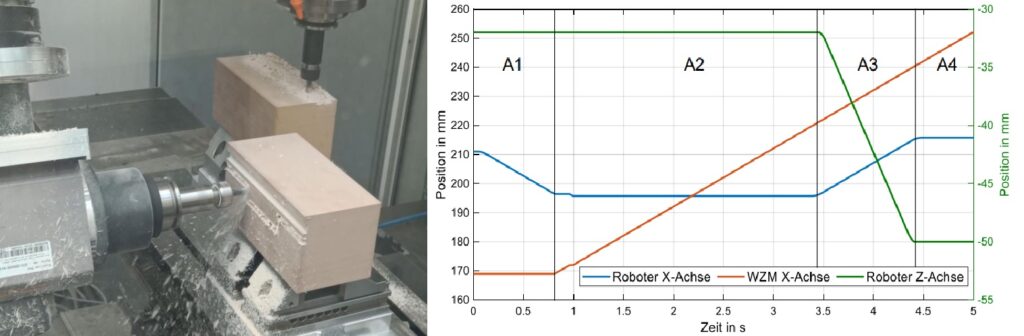
- Überlagerte Bearbeitung 2D – zeitgleiche Bearbeitung von zwei Werkstücken durch Roboter und WZM, Roboter bearbeitet andere geometrische Form (verwinkelte Nut) als WZM (geradlinige Nut), Roboter führt eigene Bewegung aus (trotzdem angepasst an Tischbewegung), Roboter und WZM benötigen jeweils ein eigenes Programm für die Geometrie
- Überlagerte Bearbeitung 3D – zeitgleiche Bearbeitung von zwei Werkstücken durch Roboter und WZM, Bearbeitung der gleichen geometrischen Form (kreisförmige Nut), Roboter führt eigene Bewegung aus (trotzdem angepasst an Tischbewegung), Roboter und WZM benötigen jeweils ein eigenes Programm für die Geometrie
Die hohe Bahngenauigkeit der Werkzeugmaschine und die Flexibilität eines Roboters ermöglichen im gemeinsamen Schaffen genaue und individuell komplexe Bearbeitung von Werkstücken. Das zeitgleiche Arbeiten der beiden Komponenten spart enorm Zeit.
Unser Projekt ebnet den Weg für schnelle, genaue und komplexe Bearbeitung. Neben der spanenden Bearbeitung kann der Roboter zusätzlich Aufgaben wie Beladen, Entladen, Scannen, Entgraten oder den 3D-Druck verschiedenster Werkstoffe (Metall, Polymere usw.) übernehmen.
Das Projekt RokoPro (Funktionsintegrierte Roboter-Werkzeugmaschinen-Steuerung für die kooperative Produktion) ist ein F&E-Kooperationsprojekt aus dem Kooperationsnetzwerk META des „Zentralen Innovationsprogramms Mittelstand (ZIM)“ gefördert durch das Bundesministerium für Wirtschaft und Technologie.
Unser Angebot: Wir diskutieren Ihre spezifischen Szenarien für mehr Effizienz und Flexibilität und simulieren Wege, diese zu erreichen.
Kofinanziert durch Zentrales Innovationsprogramm Mittelstand (ZIM)

